
南京高铁站三维数字化项目
–GEOSLAM、TRW
项目概况
作业流程
本项目作业流程主要为:通过激光扫描方式获取高铁站地上、地下室内空间的高精度点云及全景数据,通过点云获取高铁站、进站口、通道至楼梯及购票大厅、安检、候车厅空间位置;通过点云、全景影像、外业照片获取商铺、自动售票机、安检设备、治安岗亭、废物箱、消防栓(地上、地下)、摄像头、装备柜、警务室(高铁站内)、防爆罐、ATM机等设施设备的位置、尺寸及纹理来建设三维模型。
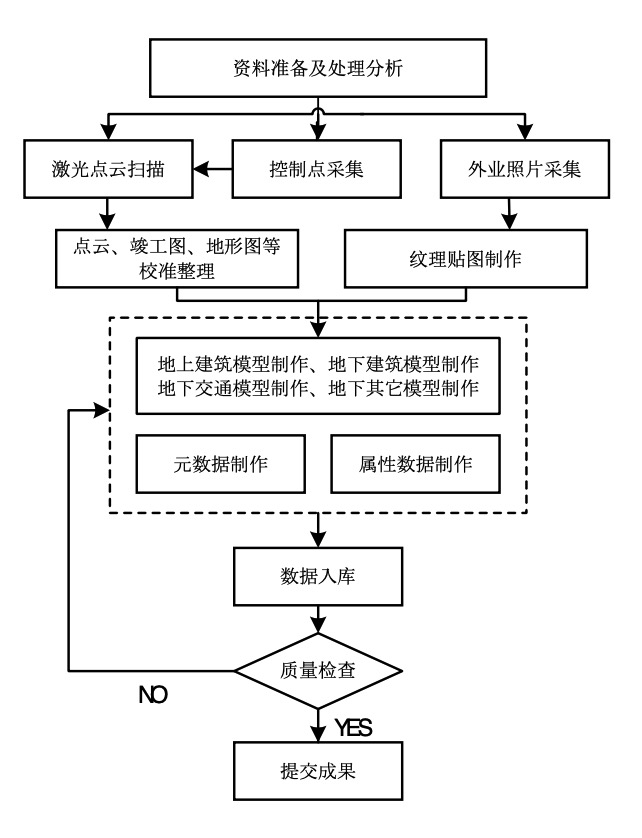 高铁站三维建模作业流程图
高铁站三维建模作业流程图资料准备与分析
根据资料的来源可分为两类。第一类为收集资料,包括:地形图、影像图、竣工资料(高铁站平面图、立面图)等。此类资料由某市公安局或市规划和自然资源局提供,来源可靠,精度高,能满足本项目精度要求。第二类为需生产单位采集的资料,包括高铁站点云数据、全景影像、外业拍摄的实景照片等。
三维模型几何体制作以激光点云为主要依据。点云数据能精准采集到物体形态,三维模型的相对位置和尺寸以激光点云数据为依据。激光点云数据经融合配准后,转换成符合本项目要求的空间坐标和格式,可与地形图、竣工图等资料结合使用,确定高铁站三维模型的空间位置、形态和尺寸。
三维模型纹理的制作以外业采集照片为主要依据。DOM影像资料和全景照片作为辅助资料。外业照片能真实的反应实际物体的外观样式、颜色和材质,DOM影像资料能准确的反映出建(构)筑物顶部纹理样式和结构样式。
外业三维数据采集及内业处理
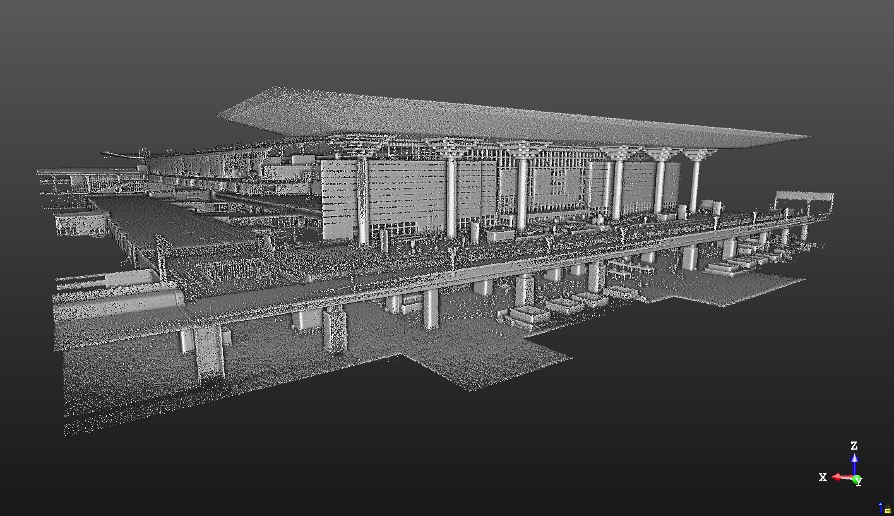
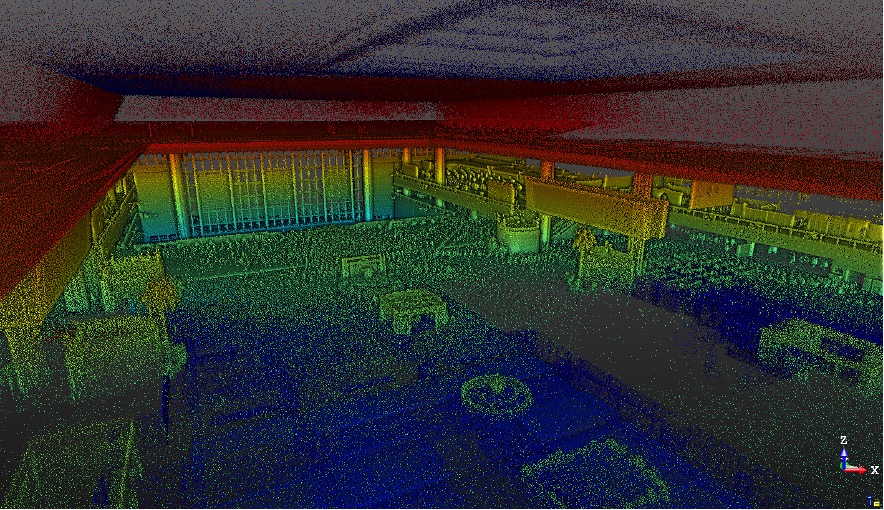
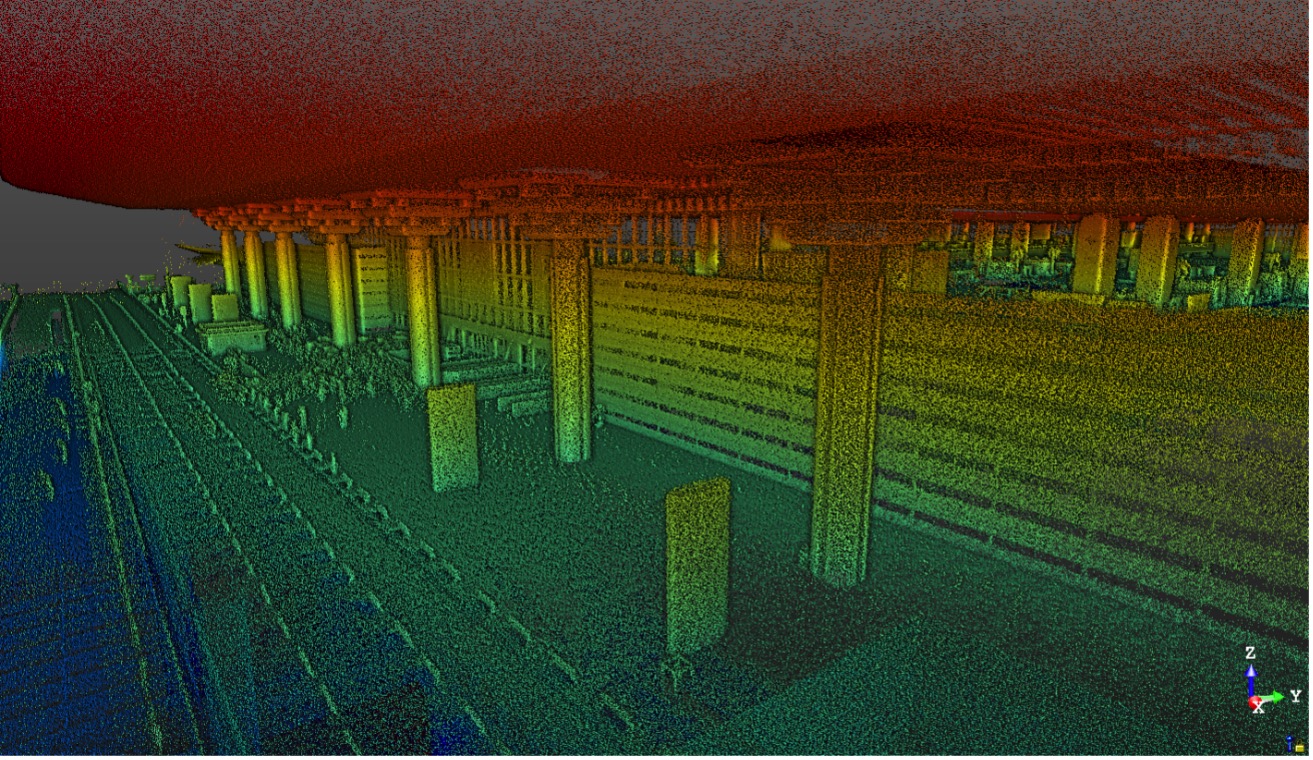
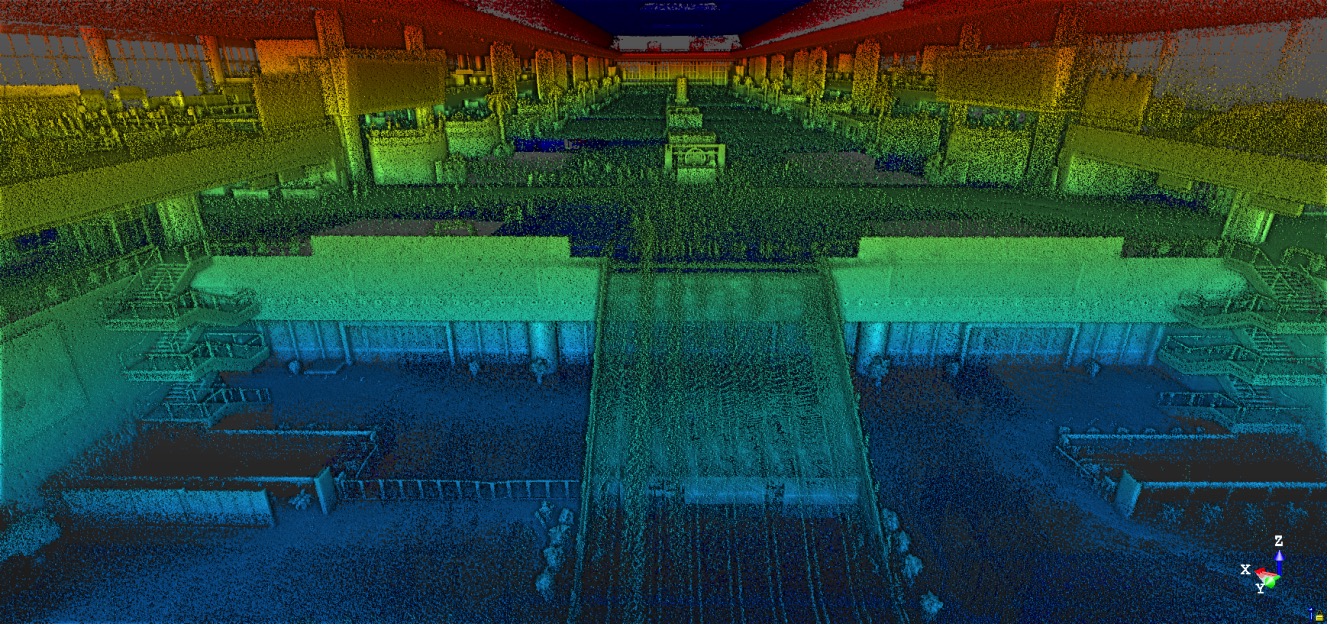
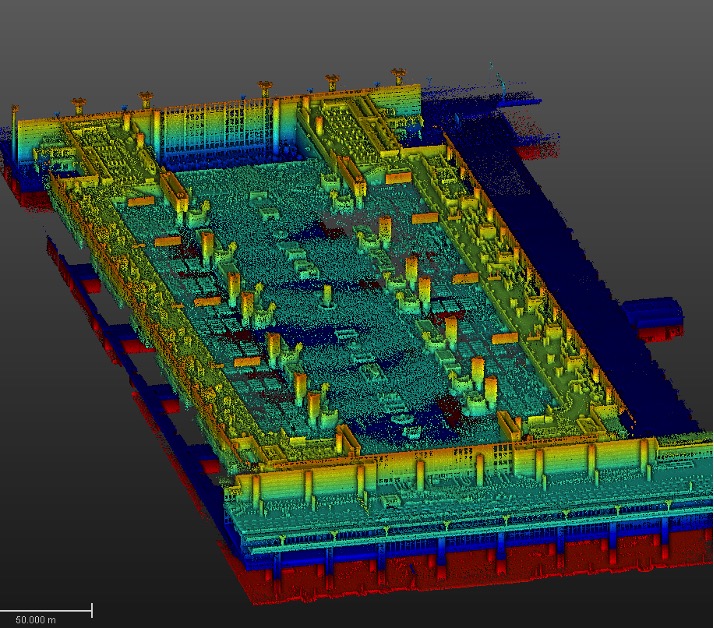
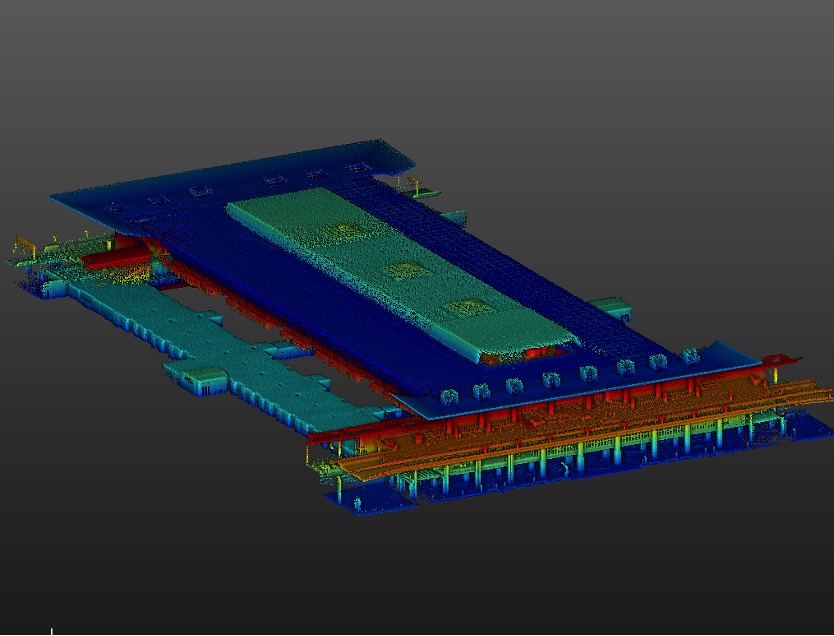
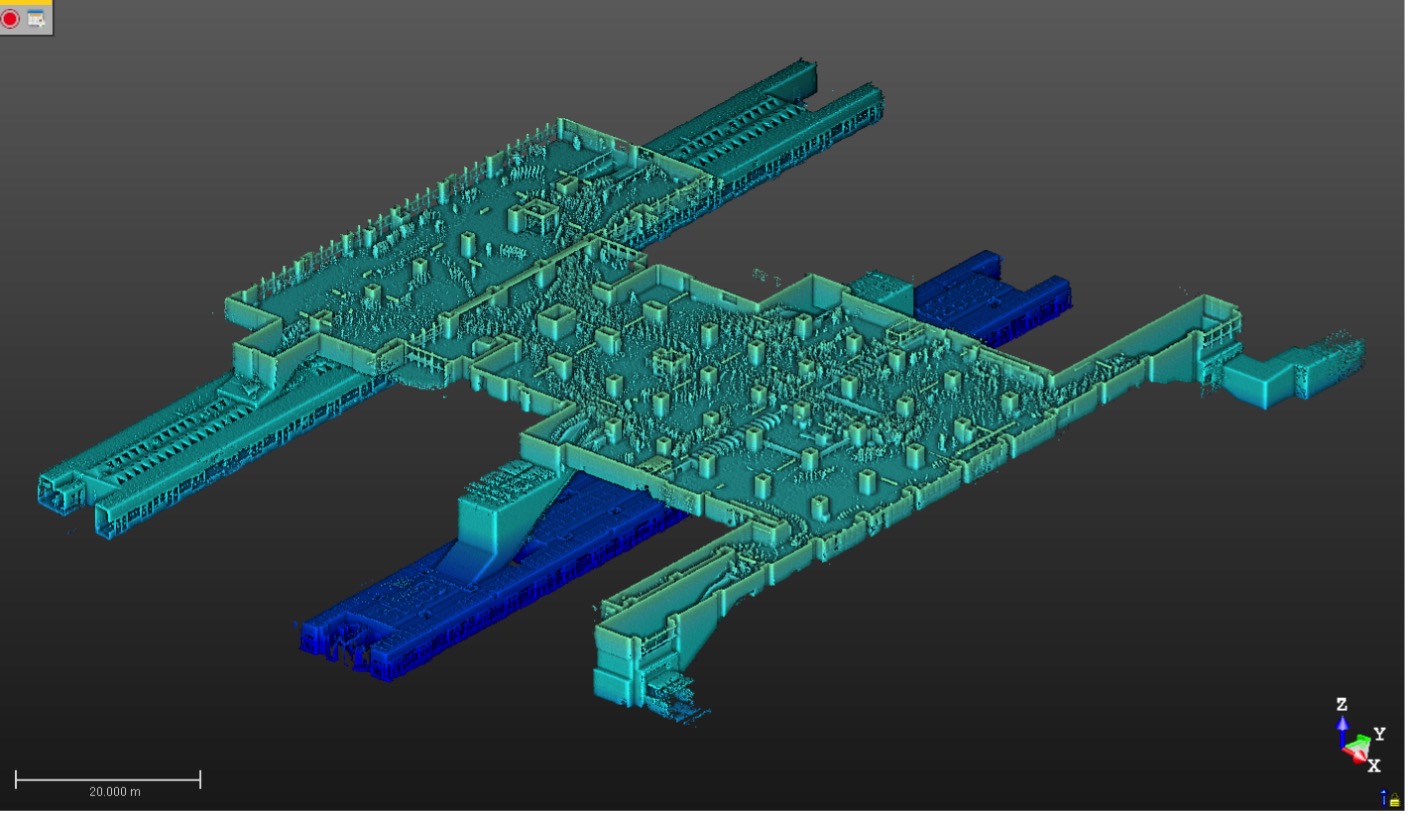
三维激光点云获取
利用SLAM移动三维激光扫描设备对高铁站进行整体扫描,数据建立测站点、配准。数据拼接精度为5cm,完全满足工程需要。

相关设备
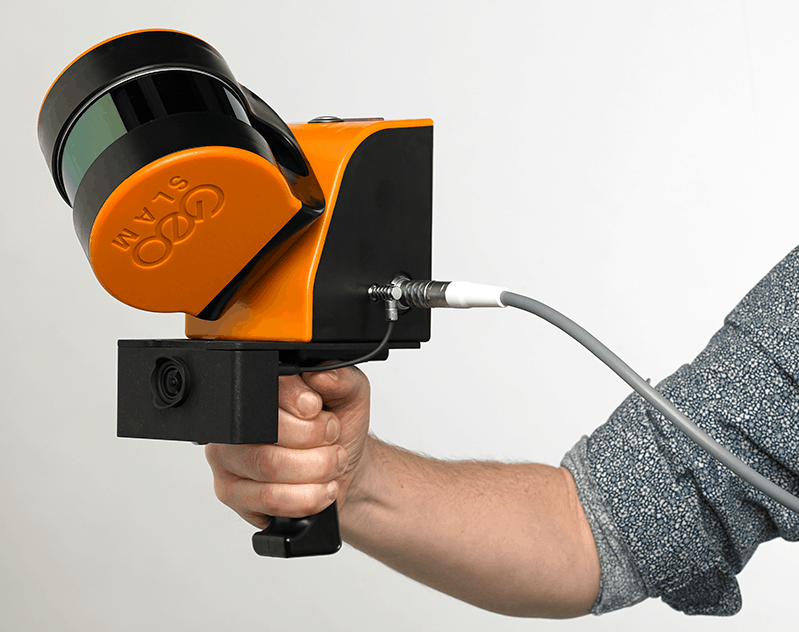
GEOSLAM ZEB-HORIZON
ZEB-HORIZON是一款由GeoSLAM公司开发,基于SLAM算法的移动手持式扫描仪。
- 无需GPS,高精度slam匹配算法
- 100米测程,适用于常规城市街道测绘
- 可以搭载至无人机,实现地空一体化采集
- 定制化套件,可以实现背载,延长,倒置等
- Geoslam HUB处理软件,集成VIEW,DRAW,MODEL多个模块
 外业数据采集
外业数据采集数据坐标转换。在点云数据配准释放完成之后,对照外业采集的控制点三维坐标值进行选取目标,转换大地坐标系。
 地理坐标转换
地理坐标转换数据预处理完成之后可以对数据进行进一步分割、取样等,最终得到需要的三维点云数据,然后把三维模型与三维点云导入软件,进行三维对比分析,输出对比报告。
软件简介

Trimble Realworks是专为当今各种扫描应用来设计的、功能强大的办公软件,可从各种三维激光扫描仪导入丰富的数据并将其转换为引人注目的三维成果。
- 配准、可视化、浏览、管理扫描仪点云数据
- 管理、处理和分析大数据集
- 无标靶自动配准,生成报告
- 集成来自Trimble GNSS、全站仪和3D数据
- 导出CAD设计包
- 发布项目数据包供单独浏览、测量、注解
- 5个版本适应不同应用场景
外业照片采集
(一)外业拍照
通过外业拍照方式获取高铁站内部空间的纹理信息,及各类设施的细部结构,其基本要求如下:
- 采用1000万以上像素的长焦数码相机或单反相机,照片文件格式统一采用相机默认格式JPEG;
- 地下空间拍照时,以从全景到局部,从左侧到右侧的方式拍摄,以最佳光线效果下采集较为真实的纹理,并保证拍摄的连续性;
- 有重复单元的表面,宜拍摄局部。无重复单元的表面,应拍摄完整表面。对结构复杂或无法正视拍摄的表面,应进行多角度拍摄,并利用图像处理软件进行纠正和拼接处理;
- 墙面海报广告可单独拍摄,拍摄者在拍摄图片清晰范围内根据现状选好角度躲开有人或其他地物遮挡的情况,避免增加制作人员工作量。
(二)照片整理
- 高铁站外业照片须按出入口、厅层名称等建立不同的文件夹存储,文件夹内须附有拍照路线图;
- 建筑外业照片须按单位名称或地址名称建立文件夹存储,须附有拍照路线图,存放在所属范围内的高铁站照片文件夹内,如图5-13所示;
- 无法拍摄的拒拍区、围挡区、封堵区要做文档详细说明。
三维模型制作
本项目参照《数据规范》具体建模及属性数据采集技术指标执行。三维模型等级包括LOD2、LOD3等级,对每一类模型要素中涉及到的每一种要素均应根据模型几何体平面位置、高程、精细度要求、模型纹理制作要求制作。制作过程主要包括白膜制作、纹理模型制作两大步骤。白膜制作主要是通过位置、范围和高度制作模型的主体结构,纹理模型制作是在白膜的基础上通过照片、影像对模型结构进行细化和贴图,最终达到成果模型的要求。通常以上两个步骤结合进行。
(一)高程与高度获取
高程采集主要目的是获取地表起伏点、高铁出入口高程,解决地下空间模型与地表模型的矛盾和穿插问题。架空高铁站及轨道需要采集建(构)筑物高程,解决高铁站与外部空间的衔接问题。建(构)筑物高程通过RTK、全站仪、激光测距仪等测量手段获取。
地下空间模型高度信息主要来源于激光扫点云数据,可以直接从配准处理后的三维激光点云上测量获取高度信息,也可以把激光点云数据导入到三维建模软件中,直接参照捕捉对应位置点云进行建模。
(二)建(构)筑物模型制作
某市高铁站分为地下站和地面站两种,地下站三维建模主要关注地下空间室内要素的模型构建,如新街口站等;地面站则既包括建(构)筑物的室外要素的建模,也包括室内空间要素的建模,如迈皋桥站等;因此,在建模过程中应注意地上地下、室内室外的模型的衔接。原则上,室外模型要素的空间位置以地形图为准、室内模型要素的空间位置以扫描点云为准,模型纹理以外业采集照片为准。
地上建筑空间模型构建时应满足以下要求:
- 基底轮廓线应基于地形图基底轮廓线生成,使用激光点云的应该通过配准使激光点云与地形图资料套合;
- 通过多维材质的方法贴制纹理,要求每个面片都要有纹理,每个面片都要展UV;
- 建筑物竣工后开放阳台部分封闭,阳台建模以少数服从多数的原则统一建模;标志性的建筑物,本身结构存在封闭阳台和不封闭阳台,按照实际情况建模;
- 模型去除冗余的点、线、和重叠闪面;
- 建筑物模型内部接边处不应存在缝隙,相交的点需焊接以确保相交点的空间拓朴关系严格重合;
- 构成模型的多边形面不允许存在黑面及印痕;
- 建筑模型结构精细度根据模型等级制作;
- 建筑物基座与地面连接处,要考虑合理性,避免出现玻璃窗户、门直接插地等情况。
地下建筑空间模型应满足以下要求:
- 地下空间模型应根据实测数据或激光扫描数据制作,模型结构表达清晰,相对空间位置关系正确,纹理与实际接近,模型观感与原物体基本一致;地下建筑空间结构体可根据激光点云位置、高度制作;
- 大型立柱特别是圆角立柱,圆弧度与实际一致,应构线不宜过多,遵循节省面片数的原则;
- 对于重复性较强的场景表达,尽量使用循环贴图的方式表达,避免新构面导致整体面数增大;
- LOD2级大于 0.5 m的立面突出物等凸凹结构需精细建模表现,特定要素0.2 m的立面突出物等凸凹结构需精细建模表现;附属设施、设备等用主体建模方式表现;LOD3级大于 1m的立面突出物等凸凹结构需精细建模表现,特定要素0.3 m的立面突出物等凸凹结构需精细建模表现;单体化要素按照点云据实表达;附属设施、设备等用主体建模方式表现;
- 模型的平面精度与高度精度应满足4.1.4模型LOD级别的精度要求;
- 模型去除冗余的点、线、和重叠闪面;
- 建筑物模型内部接边处不应存在缝隙或交叉,相交的点需焊接以确保相交点的空间拓朴关系严格重合。
建模方法主要包括以下几个步骤:
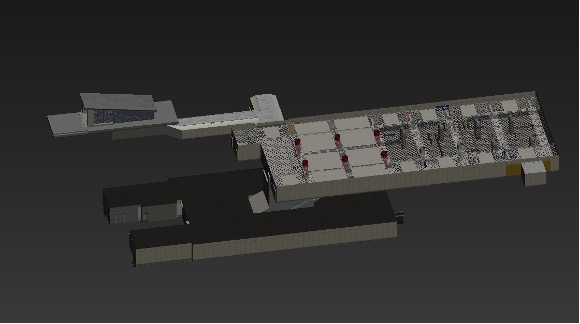
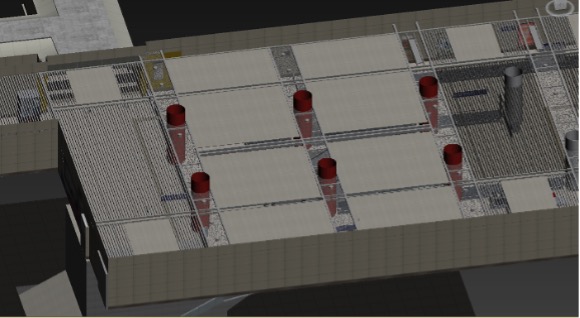
- 将整理好的点云数据.las文件转换为.rcs或.rcp格式,导入3dsmax软件中作为参照,制作地下建筑空间的框架结构模型。
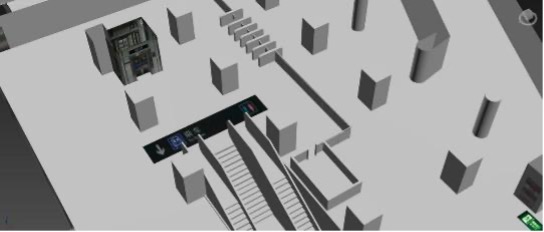
- 依据点云位置,参考照片制作出支柱、台阶、隔断、吊顶等结构并细化,如图5-14所示。
- 翻阅外业照片,选择光线明暗合适且像素质量较好的照片使用Photoshop软件制作纹理贴图,纹理样式,色调要保持与原照片一致,能表达出不同材质的质地区别,例如瓷砖、木质、铁质等。纹理拼接应合理,不宜出现接缝或残半不全的情况,不同纹理之间过渡自然。
 照片批处理
照片批处理 - 纹理贴图赋予模型,根据外业照片和彩色点云文件调整纹理UV坐标,使纹理位置,大小与实际一致。
 纹理附加
纹理附加 - 根据数据规范要求对地下建筑模型进行分层和编码,对纹理贴图命名。
(三)地下交通模型制作
- 高铁轨道根据设计资料和外业照片制作,相对关系合理,表达内容完整;
- 纹理应细节清晰,准确反映建模物体材质特征;主体建模可以采用公共通用纹理;
- 高铁轨道模型仅制作站台区范围,建模方式采用主体建模方式;
- LOD3级模型站台、防护屏等附属设施用标准模型表现。
建模方法主要包括以下几个步骤:
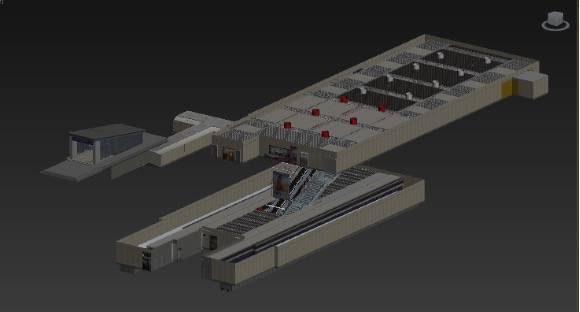
- 将整理好的平面图或照片导入3dsmax软件中作为参照,画出轨道边界线,由线构造面,制作出主体模型。
 轨道模型处理
轨道模型处理 - 参照外业照片,按照材质纹理区别切分出不同的面,将制作好的纹理贴图赋予模型,调整UV坐标,使样式大小与实际一致。
 纹理调整
纹理调整 - 高铁站台、防护隔屏等模型,根据公共区域点云和照片,切分不同的材质贴图面,赋予对应的材质贴图,调整UV坐标,保证样式大小合理。
 材质处理
材质处理 - 根据数据规范要求对地下交通模型进行分层和编码,对纹理贴图命名。
(四)其它要素模型制作
- 高铁站内设施、设备等模型的地理位置以激光点云为基准确定,数学精度应满足要求;
- LOD2级模型,包括自动售票机、安检设备、进出站闸机、治安岗亭、废物箱、消防栓(地上、地下)、摄像头、装备柜、警务室(高铁站内)、防爆罐、ATM机等设施(设备)类模型的平面精度与实地误差不大于0.2 m;
- 对于栏杆,隔断等主体建模的面片状对象,模型应采用反向复制反转法线的方式建模贴图表现,位置及几何尺寸应与现状吻合;
- 纹理应采用通用纹理,应真实、清晰地反映模型形态、结构和质地等细节信息;
- LOD3级模型可采用标准模型库表现,要能形象反映出物体的基本形态与特征。
建模方法主要包括以下几个步骤:
- 将整理好的点云数据.las文件转换为.rcs或.rcp格式,导入3dsmax软件中作为参照,获取空间位置、形状尺寸信息,绘制高铁站室内空间结构、分隔墙体、幕墙、柱体、门窗、楼板、天花板、楼梯(含坡道、台阶)、电梯(斜梯、直梯)等主要结构模型
 主要结构模型提取
主要结构模型提取 - 参照点云形态、尺寸制作自动售票机、安检设备、治安岗亭、废物箱、消防栓(地上、地下)、摄像头、装备柜、警务室(高铁站内)、防爆罐、ATM机的尺寸,用于制作标准模型库(小品库)。根据点位位置摆放到正确的位置,按照标准规范分层并赋予ID编号
(五)纹理贴图的处理
纹理贴图应以外业采集数码照片或扫描全景为参考,经过统一配色后,建立纹理库。无法采集照片的区域可参考远景照片等资料用标准纹理库中纹理酌情贴图。建筑顶面纹理贴图应参考高分辨率航空影像人工制作,并整理、归纳建筑顶面纹理库。
- 纹理色彩采用RGB24位色系,色彩直方图应呈正态分布,确保纹理接边色差不超过15%;
- 应与几何模型细节层次相匹配,纹理应清晰可辨;
- 纹理尺寸应为2的n次幂,且不宜超过2048*2048;
- 纹理特征应与实地情况相符,应真实反映实际材质的图案、质感、颜色及透明度,真实反映现状;
- 由对应影像处理得来的纹理,变形部分应作纠正处理,以减少视角或镜头畸变引起的变形;
- 纹理数据不应含建筑以外的其他物体,如:晾晒物、私人装饰等;
- 纹理拼接贴图时,应保证图像细节表现清晰,无拼接镶嵌缝隙;
- 纹理影像应色调均匀,自然美观。整个场景要进行色彩一致性检查,对不合适的色彩进行微调。
纹理贴图方法主要包括以下几个步骤:
- 处理好的立面图片可以直接贴到模型的立面,为了减少数据量,单面可以重复贴图。在不影响真实度和表现效果的情况下,建议不同模型共用同一个纹理;
- 在制作纹理时应根据模型等级处理纹理,在没办法采集照片的地方参照影像图从标准纹理库中选取类似的纹理制作,纹理不应有杂物,如衣服、人、汽车。四方连续,两方连续的纹理应避免接缝。几个衔接立面上面的砖块和楼层线应在同一水平线。LOGO,门头广告等不清晰或拉伸的纹理应根据LOGO的字体,颜色,形状重新制作。纹理的UV大小应与其他地物纹理协调,同一对象上的同一纹理的UV大小应一致,透明贴图避免出现白边。纹理颜色对比度不能过大;
- 烘焙处理:在3DSMax软件中进行模型烘焙处理,烘焙灯光参数一致,要求整个场景光影关系一致,避免出现死黑,曝光过度,大面积黑块。
此外根据甲方要求,针对每条高铁线路分别建立纹理材质库,提供给同一路线不同站点不同建模人员使用,以保证整条路线的通用纹理相同,色调明暗一致。


模型烘焙
三维模型文件到三维场景中如果要有较好的立体感,需要对三维模型进行烘焙处理,生成阴影贴图文件。不同的平台对烘焙要求不同,本项目应制作符合平台明暗显示要求的室外灯光文件和室内灯光文件,统一下发到各生产作业单位,进行烘焙。
模型接边及入库
根据本项目要求,本次招标标段工作范围的高铁站、医院等三维模型成果需入库转换为FDB、C3S格式,建立符合场景和入库要求的模型数据,与地上精细三维模型、地下空间体块盒子进行数据融合、更新以及数据矛盾处理。
由于不同的平台对模型的建模手法、参数定义、烘焙灯光都有其独特的要求,常规模型数据入库后常常会产生入库成果与MAX文件不一致的情况,根据本项目平台特点改进了作业规范,并在模型质检中增加了约束性要求,以提高入库和场景搭建效率。并针对常规性折面问题、接缝问题规范作业手法。
模型接边、更新与融合
本项目高铁站建模成果主要为高铁站室内、室外一体化模型。模型接边涉及到地下站的出入口与现有的三维模型的衔接,地面站和高架站与现有的三维模型地表、周边环境的衔接。此外,本项目要求高铁站建模成果与地下空间体块模型还要进行衔接。具体技术方法如下:
- 将高铁模型与现有的三维模型数据加载到同一场景下,通过人工逐一多角度观察的方法,若发现问题,标记出产生矛盾的位置。
- 判断数据成果精度的优先级,以精度较高的数据为基准,修改调整其他类成果,直至三类数据相对关系合理,数据融合完成。两套成果同步完场更新。
- 然后再次调整数据多角度观察检查,确保三类成果数据处理正确,提交成果。