
三维激光扫描技术在河北邢台峡谷群国家地质公园
1:1万地质灾害详细调查中的应用
三维激光扫描技术是近几年发展起来的一种新兴测绘技术,该技术已广泛应用于工程建设与物体三维测量等测绘及相关领域,具有高效率、高精度的独特优势。本文在介绍三维激光扫描仪的工作原理的基础上,以邢台峡谷群地质灾害调查为应用研究对象。为了更够在地质灾害发生前,对地质敏感区域进行很好的预警工作。利用三维激光扫描设备能够快速获取现场高精度三维数据,结合三维激光处理软件,生成相对应的地质剖面图、局部细节尺寸等信息,对应急灾害提供精准可靠的基础数据。
三维激光扫描原理与方法
1.三维激光扫描仪基本原理
三维激光扫描仪的工作过程,实际上就是一个不断重复的数据采集和处理过程,它通过具有一定分辨率的空间点(坐标x,y,z,其坐标系是一个与扫描仪设置位置和扫描姿态有关的仪器坐标系)所组成的点云图来表达系统对目标物体表面的采样结果。三维激光扫描技术是将实体的三维复杂信息通过激光的捕获形成带有属性信息的实体三维点云模型,通过高速激光的扫描测量,获取目标的点、线、面、体、空间等三维实测数据进行高精度三维逆向建模,又称实景复制技术。
2.数据处理方法
为了能够得到好的三维点云数据需要对采集的原始数据进行处理,数据处理通常包括各测站点云数据拼接配准、数据去噪和坐标转换等操作,数据拼接通过有多种方法,无目标拼接、有目标拼接以及采集过程实时自动处理拼接。
三维激光扫描仪数据采集及点云处理
1.项目概况
河北邢台峡谷群国家地质公园1:1万地质灾害详细调查的测量工作,是依据邢台市国土资源局组织专家评审的《河北邢台峡谷群国家地质公园1:1万地质灾害详细调查设计书》开展工作的。测绘主要工作内容为:①1:200剖面测量;②1:500剖面测量;③1:200立面测量。其中地质剖面测量和立面测量工作主要是通过三维激光扫描设备进行数据的采集和处理,从而提交相应的符合精度要求的成果数据及报告。
本项目采用Trimble SX10三维激光扫描仪完成大量测量工作,由于三维激光扫描需要将三维激光扫描仪独立坐标系统引入到当地绝对坐标系统中,所以本项目在每个地质灾害点布设图根点1个,图根点采用河北省卫星定位综合服务系统(HBCORS)。
2.设备投入
 表1-1本项目设备投入情况
表1-1本项目设备投入情况3.外业数据采集
三维激光扫描技术相对于传统数据采集方式具有更高精度、远距离获取等优势。本项目利用三维激光扫描技术进行地质点三维点云数据的采集以及获取,结合生成的地质剖面模型进行了地质点处地质剖面和立面测量工作。首先,根据各地质灾害点的区域大小、位置等情况,规划扫描站数和需要测量的特征点,利用天宝SX10进行数据的扫描,采集点云数据和全站仪特征点数据,内业主要利用Trimble TBC、Trimble TreaWorks软件处理点云数据,生成相应地质灾害点的剖面线和立面图等成果。
点云数据的采集分为准备工作和扫描两个阶段。准备工作主要是对现场进行踏勘,了解现场的具体环境,找出实地环境比较开阔而地方进行测站位置的选取,测站位置必须保证以最少的测站数获取所有的目标数据,根据测站位置以及每一站的扫描范围来决定整体工作流程,每个测站利用已知控制点进行定向工作,使用SX10设计测站,扫描所需要的点云,再利用SX10全站仪功能测量一些特征点,这些特征点可以用来检核点云精度。SX10三维激光扫描仪最大扫描测程可以达到600米范围,扫描速度高达每秒26600个点,点云尺寸100米处仅14毫米,最高扫描精度1mm,测角精度可以达到1″。
 图1-1 外业数据采集现场
图1-1 外业数据采集现场相关设备

Trimble SX10 影像扫描仪
- 3DM新闪电技术,真正将高精度测量与高速扫描融为一体
- 测程,1mm+1.5ppm精度,1″全站仪功能
- 点/秒,扫描距离>600m,50m处光斑最小8mm
- 置5相机,Trimble Vision技术,所见即所得
- 式工作流,无需拼接
- Access和Trimble Business Center全兼容
4.点云数据处理及分析
点云数据分析
由于地质环境周围的植被或人工建筑物以及天气影像,点云数据存在少量系统误差和噪声,不能直接使用且点云数据量大,会消耗巨大的存储空间,因此需要对点云数据分析,判定点云是够存在未扫描的部位,若存在缺失部分,需要进行重新扫描,如果数据存在较小的空洞,即可进行补洞处理。
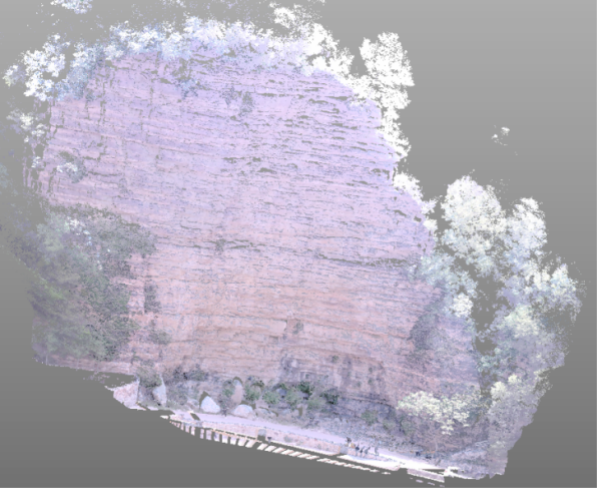 图1-2在TBC中加载后的原始三维点云
图1-2在TBC中加载后的原始三维点云点云数据去噪处理
在三维几何模型中,特征和噪声往往具有一些类似的几何属性为了将噪声与特征区分开来,将不连续、变化大的点云数据看作噪声,而将连续的起伏小的点云视为特征信息。理论上想要达到的去噪效果是在去除噪声的同时尽可能保留点云数据的特征信息,但在点云数据的实际处理过程中,不仅仅需要去噪,还需要对模型的表面进行重新构建,使模型表面的曲面保持连续性。本项目根据点云市级情况,采用双边滤波算法进行点云去噪,通过将点云数据利用TBC导出LAS格式后导入Trimble TREAWORKS中进行点云处理,Trimble TreaWorks是专业的激光点云处理软件,具有方便快捷的点云处理功能。
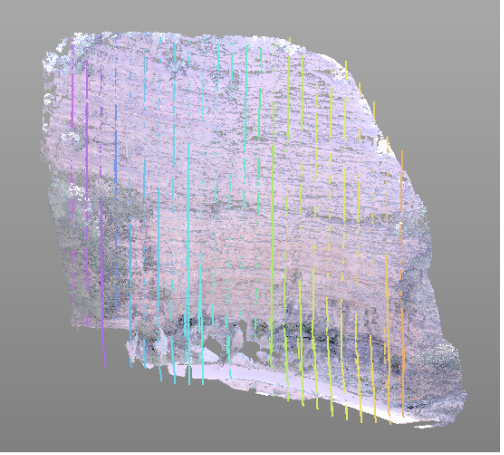 图1-3利用TreaWorks过滤噪点后的三维点云数据
图1-3利用TreaWorks过滤噪点后的三维点云数据点云数据简化
点云数据具有海量数据的特点,其采集原理是以所需精度为间隔进行点,云数据采集,这也造成了在地质剖面上曲率较小的位置点云数据冗余的现象,因此需要对点云数据进行简化。本项目采用曲率采样的方式进行简化,其主要思想为: 尽量保留曲率大的区域的点云数据,以保证点云的细节特征,利用Trimble TreaWorks具有的独特算法通过减少曲率小的区域的点云数据的方式来减少数据冗余。
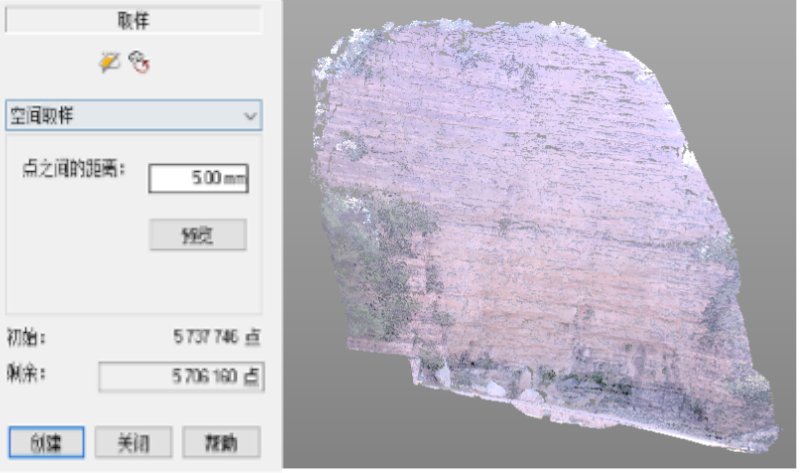 图1-4 利用TreaWorks对曲率大的区域进行点云处理
图1-4 利用TreaWorks对曲率大的区域进行点云处理表面模型生成
数据导入TBC可得到点云数据,利用Trimble TreaWorks软件自动分类地面、建筑物、电线杆和标志、高植被。软件可以通过对应的算法剔除周围的杂点,根据效果抽稀点云。在剔除植被、地物等非地貌部分点云数的基础上,利用Trimble TreaWorks基于点云数据生成三维模型,并对有问题的部分进行修改编辑。
数据成果生成
在Trimble TreaWorks软件中,根据实际项目需求,进行相应位置和区域的地质剖面线和立面图的生成,并可根据现场已有控制点,或利用SX10 全站仪功能测量的特征点进行相应误差检核工作。Trimble TreaWorks数据处理软件可以将剖面线、立面图数据导出为CAD(DXF/DWG)、GIS(SHP) 等格式的数据成果。
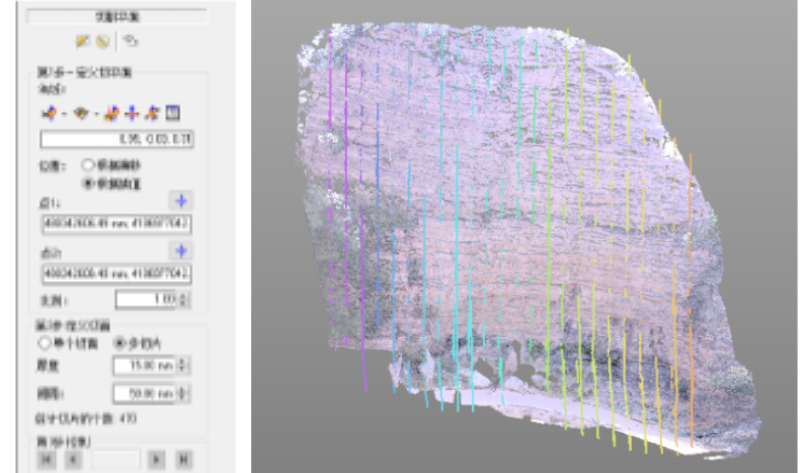 图1-5 对处理好的点云数据进行剖面切割
图1-5 对处理好的点云数据进行剖面切割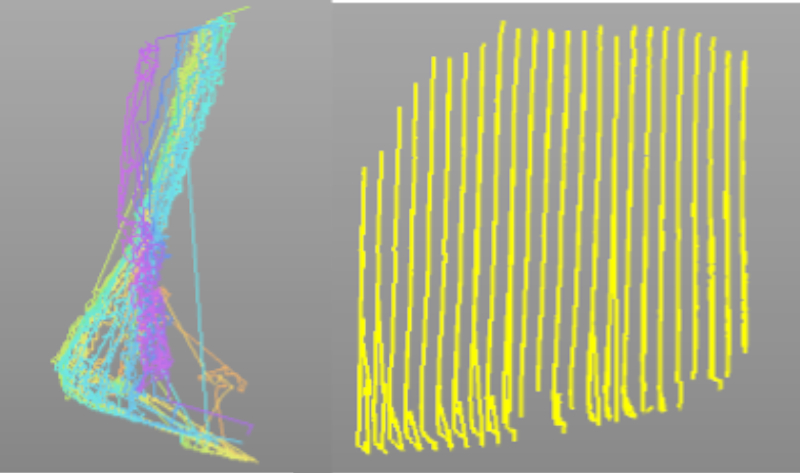 图1-6山体剖面视图查看
图1-6山体剖面视图查看软件简介

Trimble Realworks是专为当今各种扫描应用来设计的、功能强大的办公软件,可从各种三维激光扫描仪导入丰富的数据并将其转换为引人注目的三维成果。
- 配准、可视化、浏览、管理扫描仪点云数据
- 管理、处理和分析大数据集
- 无标靶自动配准,生成报告
- 集成来自Trimble GNSS、全站仪和3D数据
- 导出CAD设计包
- 发布项目数据包供单独浏览、测量、注解
- 5个版本适应不同应用场景
测量过程中出现的技术问题及处理情况
由于项目区域位于都位于山区,测量时间为初夏,山区存在很多树木、草丛等植被,SX10外业扫描时也会把这些植被扫描进行来,这就需要内业处理时剔除这些植被和草丛数据,否则会影响剖面线和立面图等数据成果的精度。SX10后处理软件采用Trimble TBC、Trimble TreaWorks软件,该软件具有点云自动分类功能,可以在剔除植被、杂点、噪点之后在进行相应数据成果的生成,并进行相应的数据成果精度检验。
项目总结
本项目通过利用三维激光扫描技术获取到地质区域的高密度、高精度的三维点云数据,对与处理好的三维点云进行特征提取,精确获得整个坡体地面现状,通过对典型区域进行处理分析,进行地质灾害严重性的预判和应急处理。三维激光扫描技术具有绝对的先进技术优势和应用潜力,这种数据获取方法具有无需事先埋设监测设备、非接触测量、作业速度快、测量精度高,能够及时的反应地质灾害隐患区域的总体形态,比较适合大型地质灾害监测,具有一定的现实意义和应用价值。